|
|
|
|

|
|
|
|
|
|
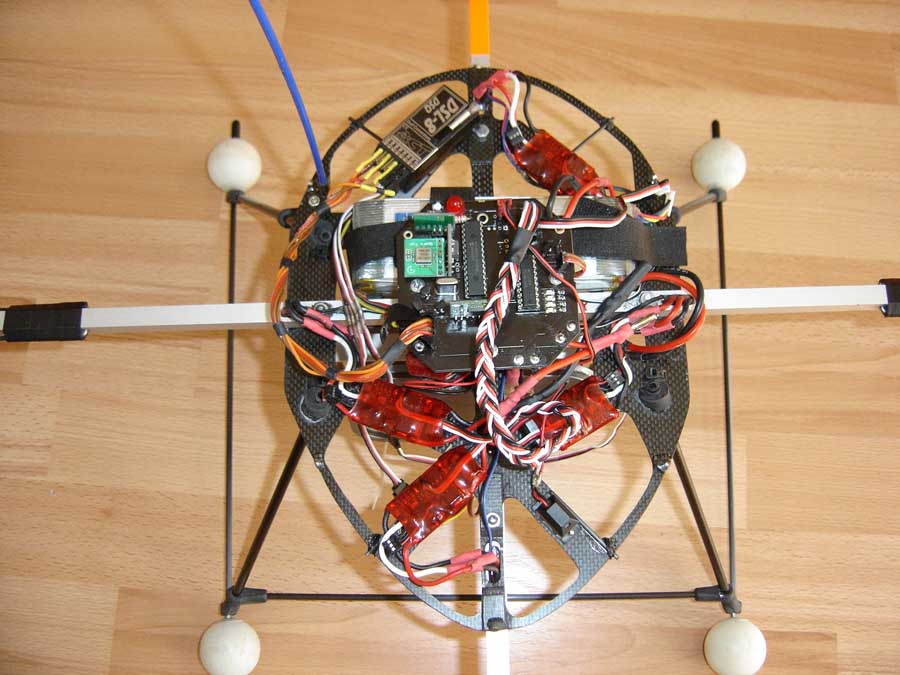
Foto von Jörg Reuter von der LVZ |
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
Fernbedienung mit Videopult |
|
|
|
|
|
|
|

|
|
|
|
|
|
Videobrille aus einen Camcorder-Sucher |
|
|
|
|
|
|
|
|

|
|
|
|
|
|
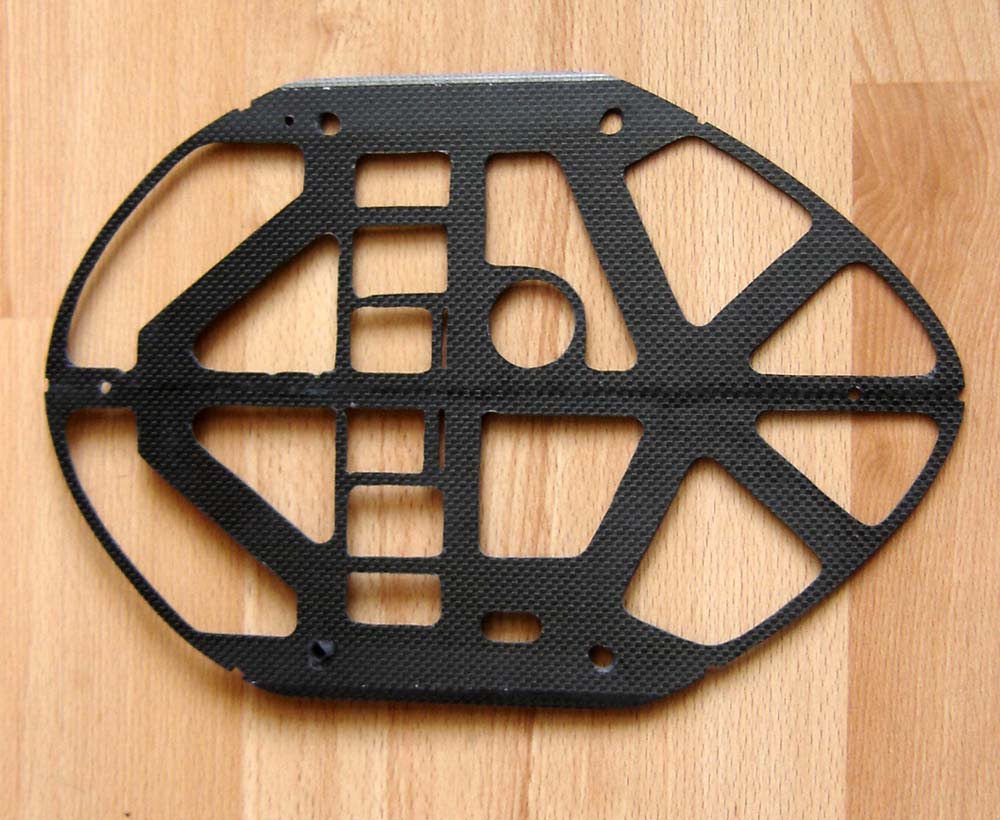
die CFK-Grundplatte (mit Dremel geschnitten) |
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
die Halter und Steckteile für den Schutzring |
|
|
|
|
|
|
|

|
|
|
|
|
|
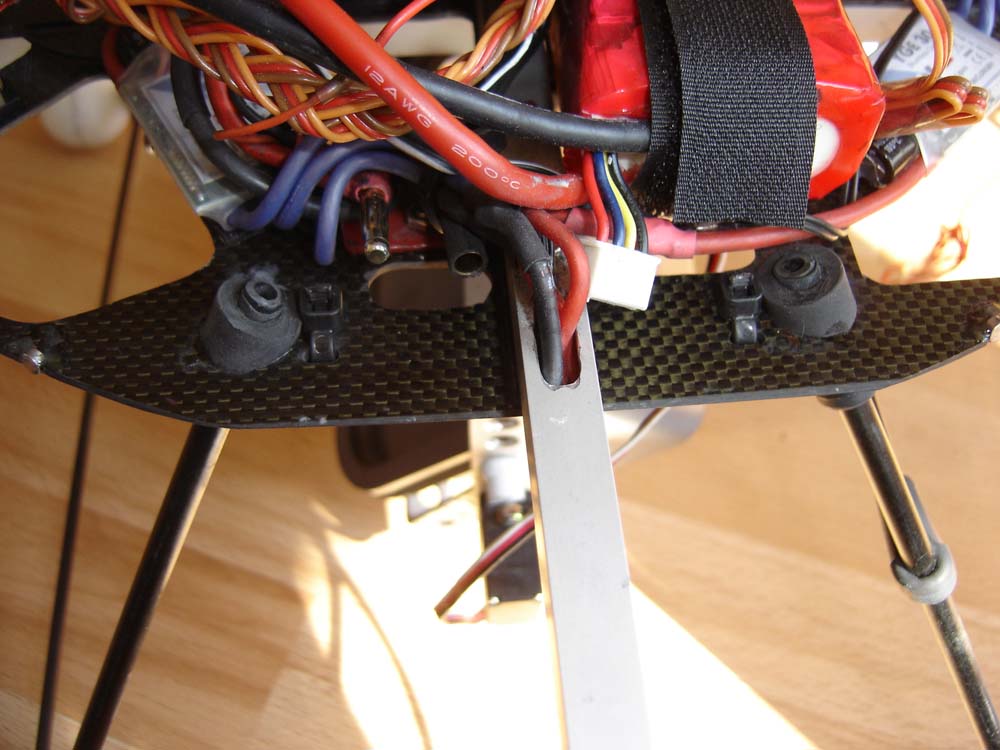
Befestigung des Landegestells |
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
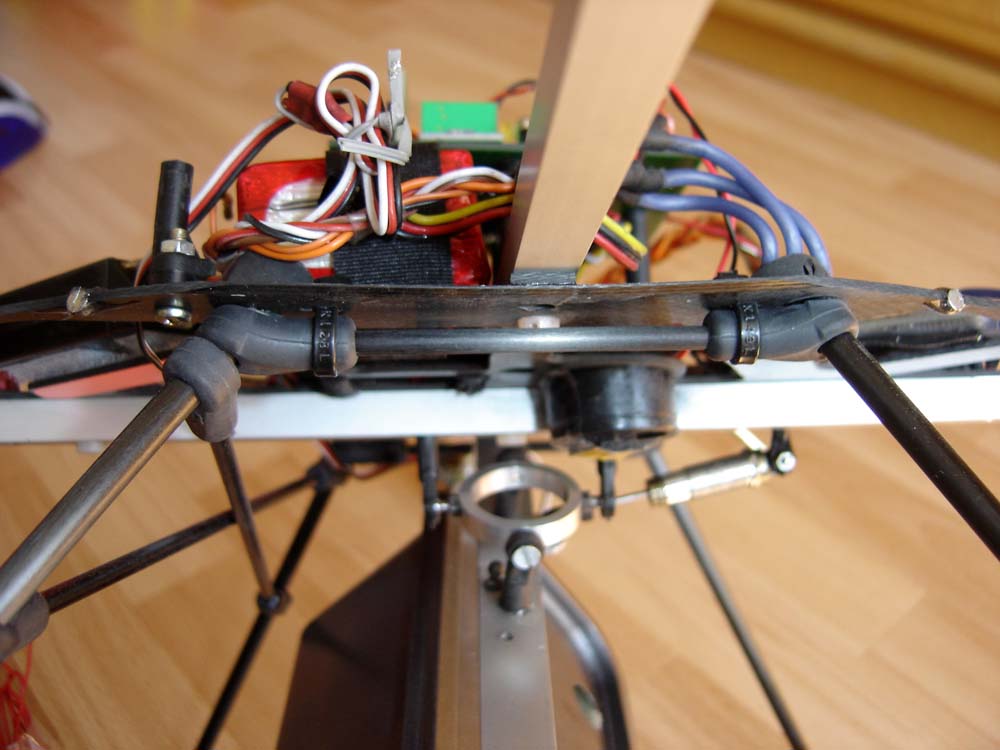
Drachenverbinder am Landegestell |
|
|
|
|
|
|

|
|
|
|
|
|
Tischtennisbälle als Bodengleiter |
|
|
|
|
|
|

|
|
|
|
|
|
Tiefziehvorrichtung für die Haube |
|
|
|
|
|
|
|

|
|
|
|
|
|
Um möglichst viel Gewicht zu sparen, musste ein etwas stabilerer Margarinebecher (Reala) als Grashbox herhalten.
Getarnt in Farbe fällt`s kaum auf. |
|
|
|
|
|
|

|
|
|
|
|
|
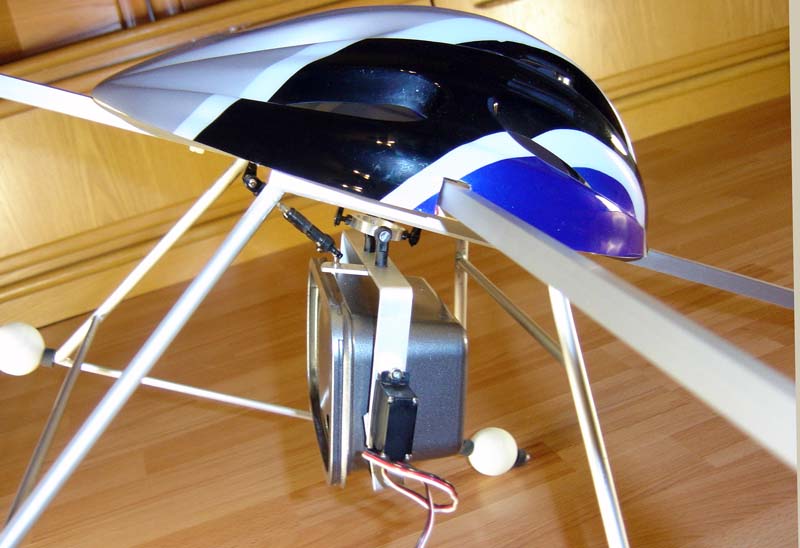
Die Kamera kann von schräg hoch bis mehr als senkrecht nach unten geschwenkt werden. |
|
|
|
|
|
|

|
|
|
|
|
|
Nach der Idee von Camdrone hängt die Kamera immer waagerecht. |
|
|
|
|
|
|
|

|
|
|
|
|
|
Die Stoßdämpfer werden ersetzt. Der Versuch, vorhandene Friktionsdämpfer abzudichten und mit Öl zu füllen ist mißlungen. |
|
|
|
|
|
|

|
|
|
|
|
|
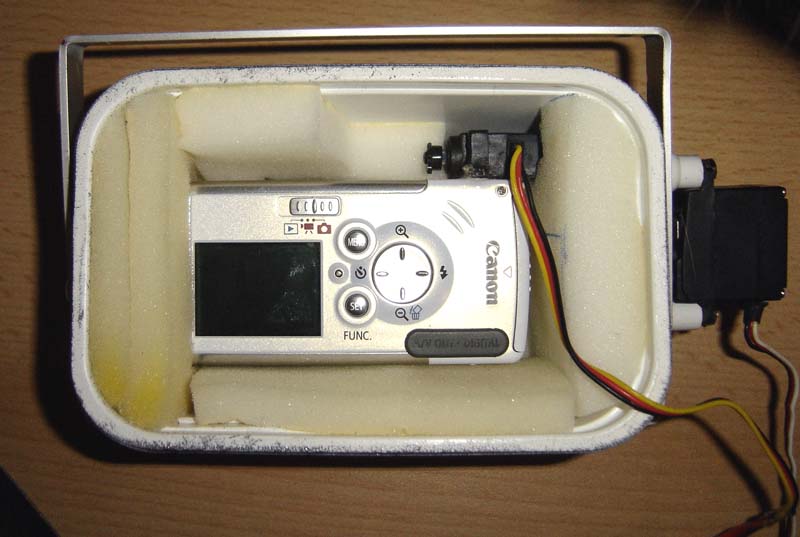
Nicht schön, aber zweckmäßig.
Um Vibrationen nicht auf die Kamera zu übertragen, wird sie nur leicht an wenigen Punkten in der gut ausgepolsterten Box gelagert. |
|
|
|
|
|
|

|
|
|
|
|
|
Die Kamera ist zu kompakt und voll für den Anschluss Einbau eines Schaltkanals, deshalb das gute alte Servo! |
|
|
|
|
|
|
|

|
|
|
|
|
|
Kritischer Blick. Alles richtig gemacht? |
|
|
|
|
|
|

|
|
|
|
|
|
Entweder gelangweilt oder unzufrieden. |
|
|
|
|
|
|

|
|
|
|
|
|
erster Test der Luxeon-Rebel LEDs |
|
|
|
|
|
|
|
|
|
|
|
|
|
|